





Automobilhersteller sind von der Verknappung elektronischer Komponenten betroffen, obwohl der Trend zu intelligenten Autos unaufhaltsam ist. Als der unmittelbarste und eindrucksvollste Beweis für die Intelligenz für die Benutzer ist das PEPS -System (Passive Entry and Passive Start) nicht mehr nur für High-End-Autos ein hochkarätiges Merkmal. Es wurde von vielen Autoherstellern, insbesondere aufstrebenden Marken, in Mittelklasse- oder sogar sparsame Modelle eingeführt. Auf dem chinesischen Markt, wo die Verkäufe von Elektrofahrzeugen in der ersten Hälfte des Jahres 2022 ein Wachstum von mehr als 100 Prozent verzeichnen, haben große Elektroautohersteller wie BYD, GAC Aion, Geely, Nio, Xpeng und Li Auto im Grunde alle Modelle mit PEPS ausgestattet .

Während dieses ECU uns Autofahrer leise verblüfft, haben wir jemals daran gedacht, die Spur seiner Herstellung und die Aussicht auf seine Zukunft zu untersuchen? Lasst uns los fahren.
PEPS bietet Autofahrern die Möglichkeit, sicher in das Auto einzusteigen, ohne die Aktivität manuell zu entsperren. Der Motor und das HVAC-System des Autos können ferngesteuert gestartet werden, bevor der Fahrer oder die Passagiere in das Auto einsteigen. Während alle Passagiere das Auto verlassen, verriegelt das PEPS automatisch das Auto. Auf diese Weise genießen Autofahrer den Komfort des passiven Zugangs bei gleichzeitiger Sicherheit. Das muss der Grund sein, warum wir es mit dem Wort „passiv“ bezeichnen.
Gestern: RKE und PKE
Derzeit integrieren Mainstream-PEPS-Lösungen drahtlose Technologien wie Bluetooth Low Energy (BLE), NFC, RFID (High Frequency und Low Frequency) usw. Nun, wie funktionieren sie? Es wäre schwer zu verdauen, wenn wir die Geschichte heute erzählen würden. Also, warum blitzen wir nicht auf gestern zurück?
Ende der 1990er Jahre führten einige High-End-Automodelle schrittweise ein Remote Keyless Entry (RKE)-System ein, eine Weiterentwicklung der früheren IMMO-Lösung (Wegfahrsperre) auf Basis von Niederfrequenz-RFID (125 kHz). Als Vorgänger des PEPS verfügt das RKE über einen Schlüsselanhänger zur Übertragung von UHF-Signalen (Ultrahochfrequenz) an einen HF-Empfänger, der mit dem BCM (Body Control Module) des Fahrzeugs verbunden ist, um die Benutzeridentität zu überprüfen. Sobald die ID verifiziert ist, führt das System eine Aktion zum Öffnen/Schließen der Tür durch, die vom BCM gesteuert wird. Ein solcher unidirektionaler Verifizierungsmechanismus, wie er in Abbildung 1 gezeigt wird, kann als voreingestellte Chiffre in einem Spionagefilm interpretiert werden. Wenn ein besuchender Geheimagent zu einem Versammlungsort kommt, muss er oder sie eine solche Chiffre sprechen oder zeigen. Wenn die Chiffre korrekt ist, wird er oder sie eingelassen. Der Nachteil dieses Mechanismus besteht darin, dass, sobald der Feind infiltriert ist und die Chiffre erlangt hat,
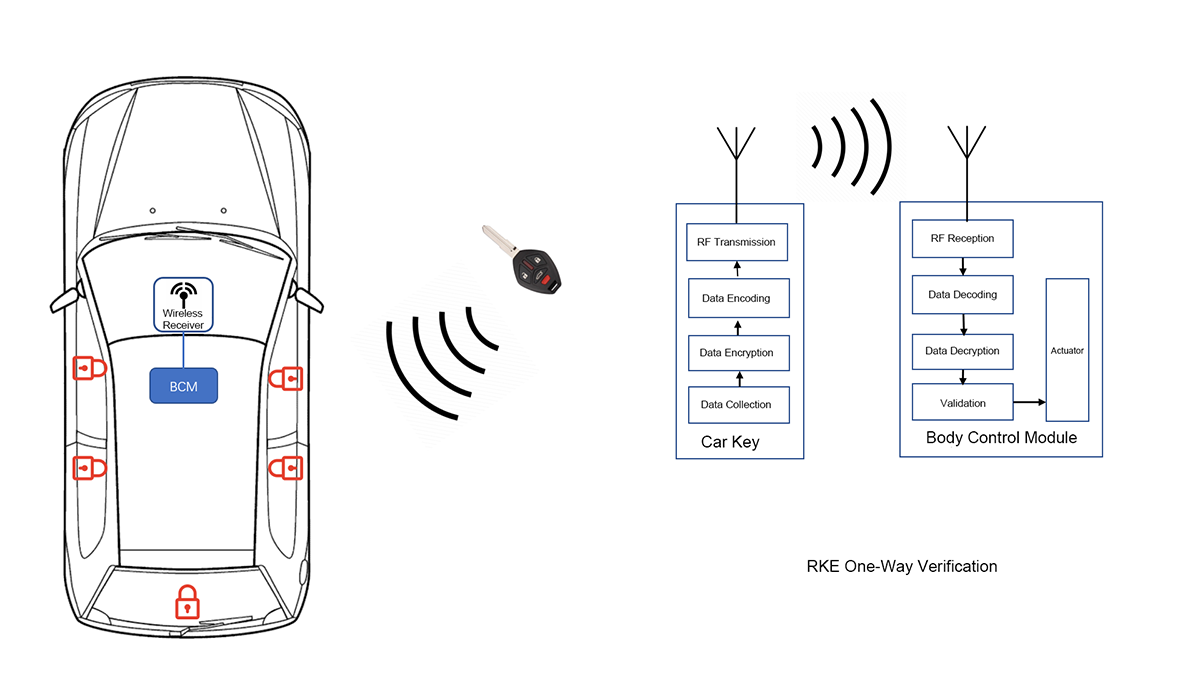
Abbildung 1. Arbeitsmechanismus von RKE
Die RKE-Lösung verwendet Frequenzbänder von 315 MHz (in den USA, China und Japan usw.), 433,92 MHz (in Europa, China) und 868 MHz (in Europa). In Bezug auf die Signalmodulation verwenden die meisten Länder das ASK (Amplitude Shift Keying). )-Modus, während Japan den FSK-Modus (Frequency Shift Keying) übernimmt.IC-Anbieter wie Silicon Labs, Maxim, Microchip und NXP usw. haben Angebote in diesem Bereich.
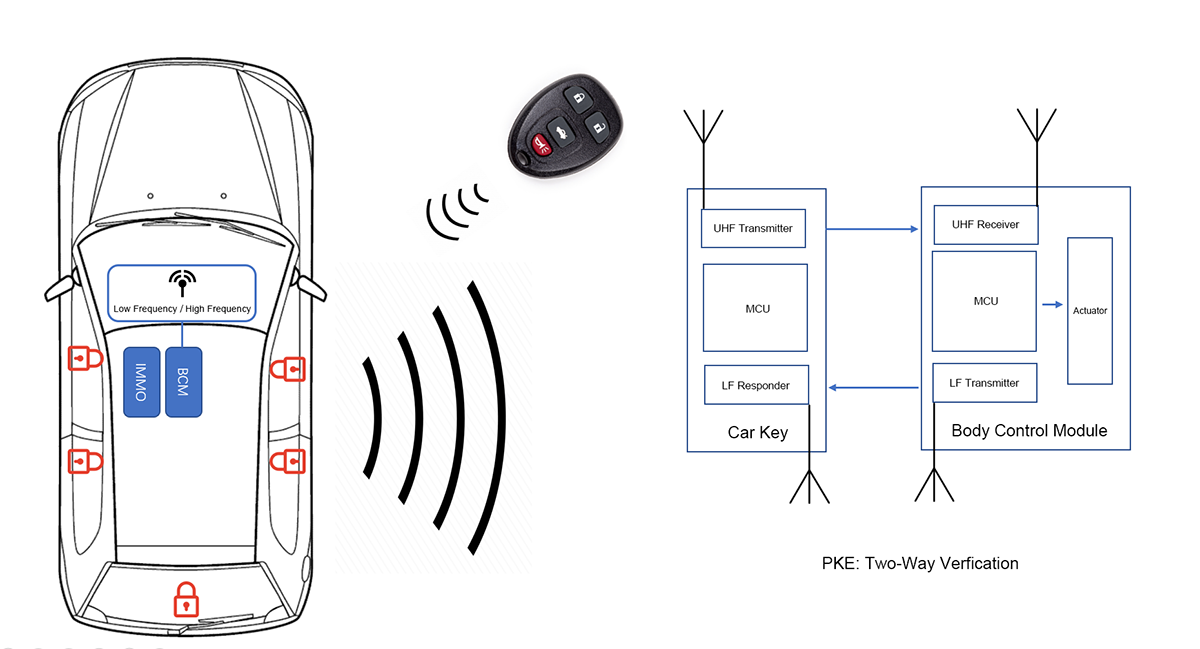
Abbildung 2. Arbeitsmechanismus von PKE
Heute: Bluetooth PEPS ist Mainstream
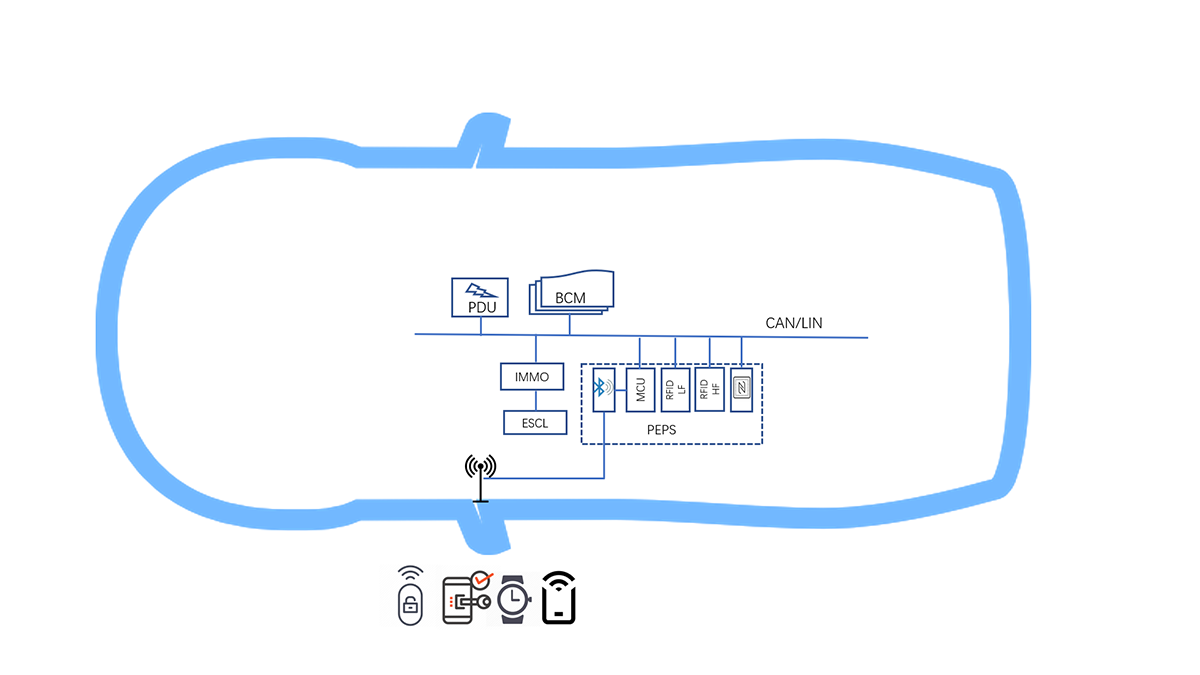
Abbildung 3. Bluetooth-PEPS-Einstiegsschema (RSSI-Einzelstation)
AOA-Technologie zur Realisierung von Mainstream-PEPS
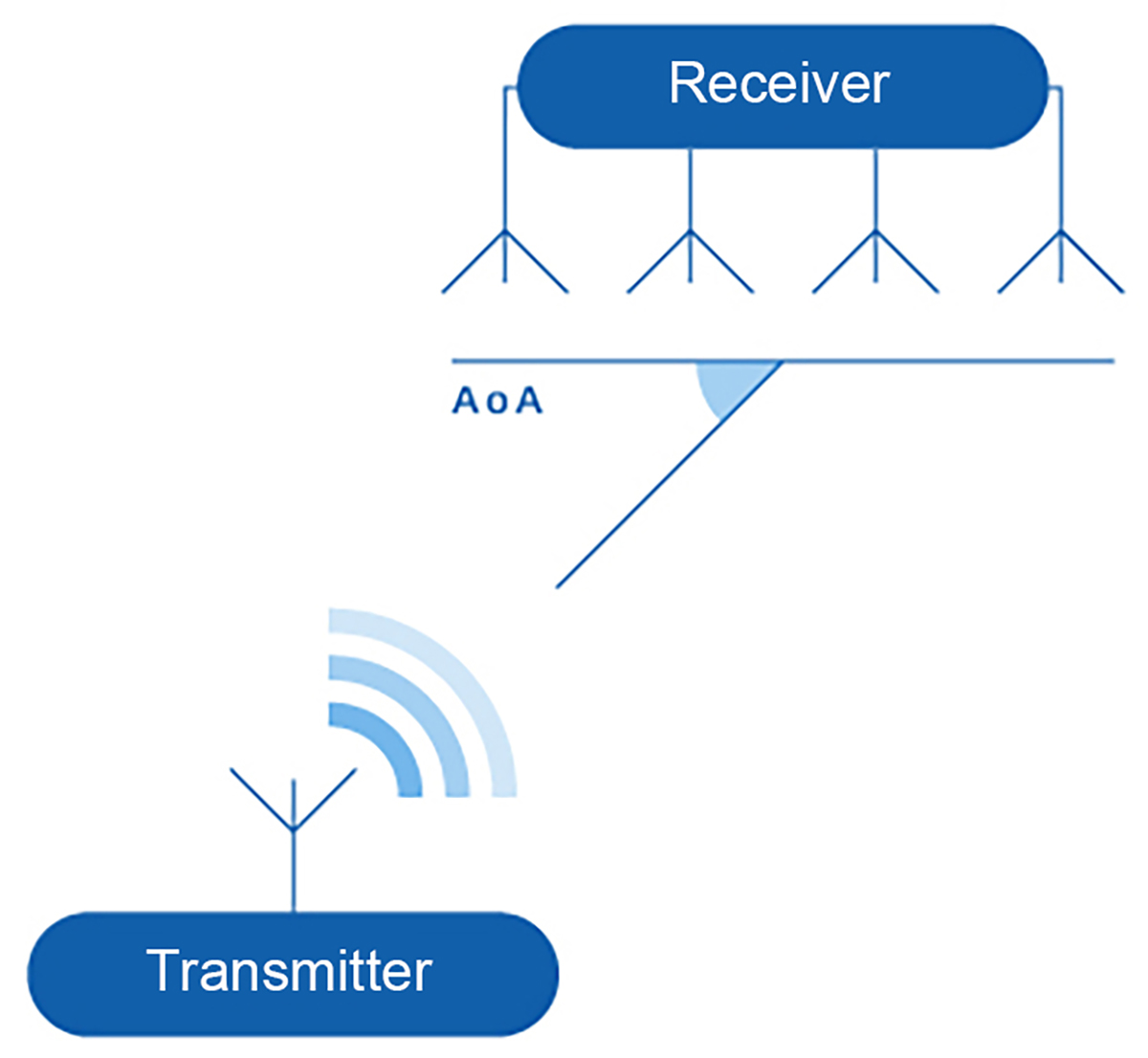
Abbildung 4. Bluetooth-AOA-Positionierung
Um die Genauigkeit der Positionierung zu verbessern, benötigen wir natürlich die Unterstützung mehrerer Bluetooth-Basisstationen mit AoA-Algorithmus. Daher entscheiden sich die Autohersteller bei Modellen der mittleren Klasse für den Einsatz von Mehrpunkt-Bluetooth-PEPS, wie in Abbildung 5 dargestellt, die genaue Anzahl der Basisstationen und das Layoutmuster variieren jedoch in gewissem Maße für verschiedene Automodelle.
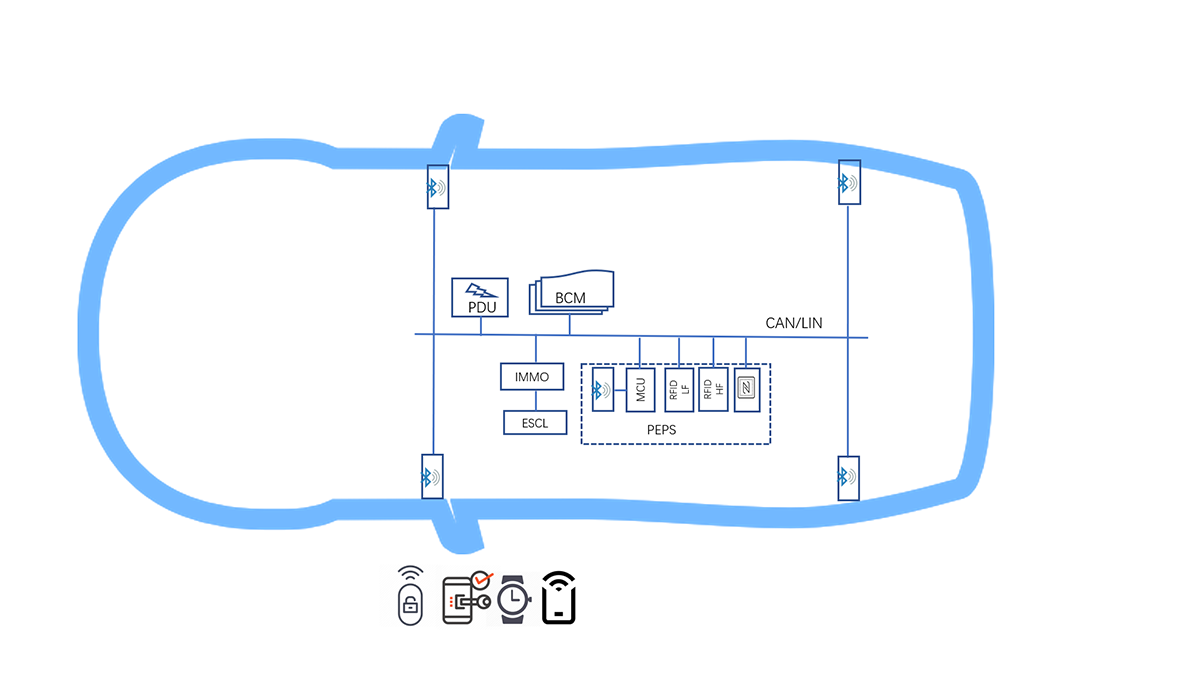
Abbildung 5.Mainstream-Bluetooth-PEPS-Lösung (AoA-Positionierung)
Zu den am häufigsten verwendeten SoCs im Bluetooth-PEPS-Bereich gehören TI CC2640, Silicon Labs EFR32BG22 und NXP KW36 usw.
Morgen: UWB ist
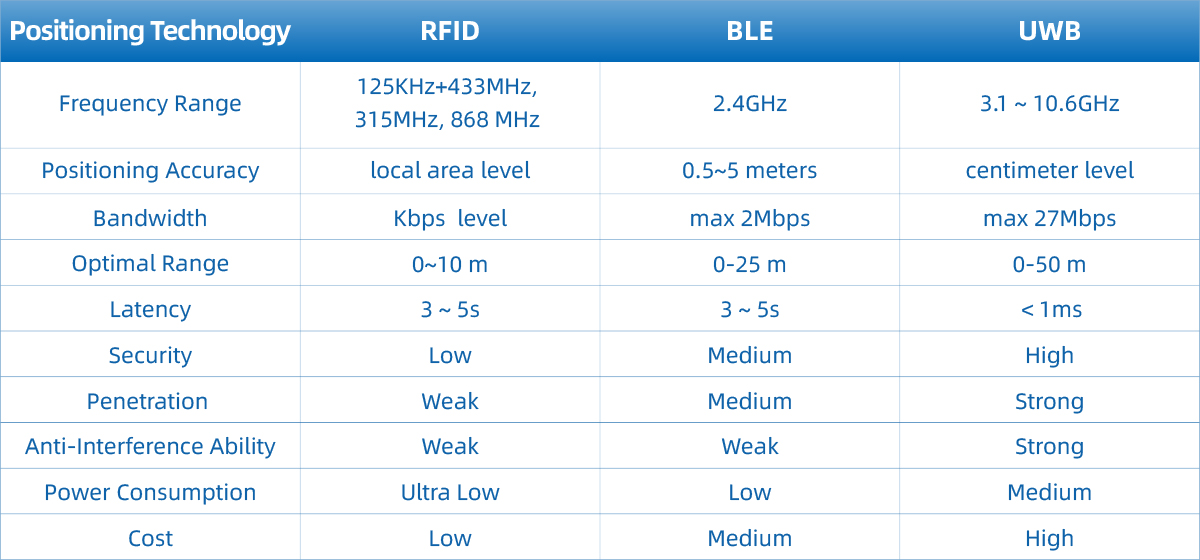
Tabelle 1. Vergleich der PEPS-Positionierungstechnologien
Positionierungsalgorithmen für UWB
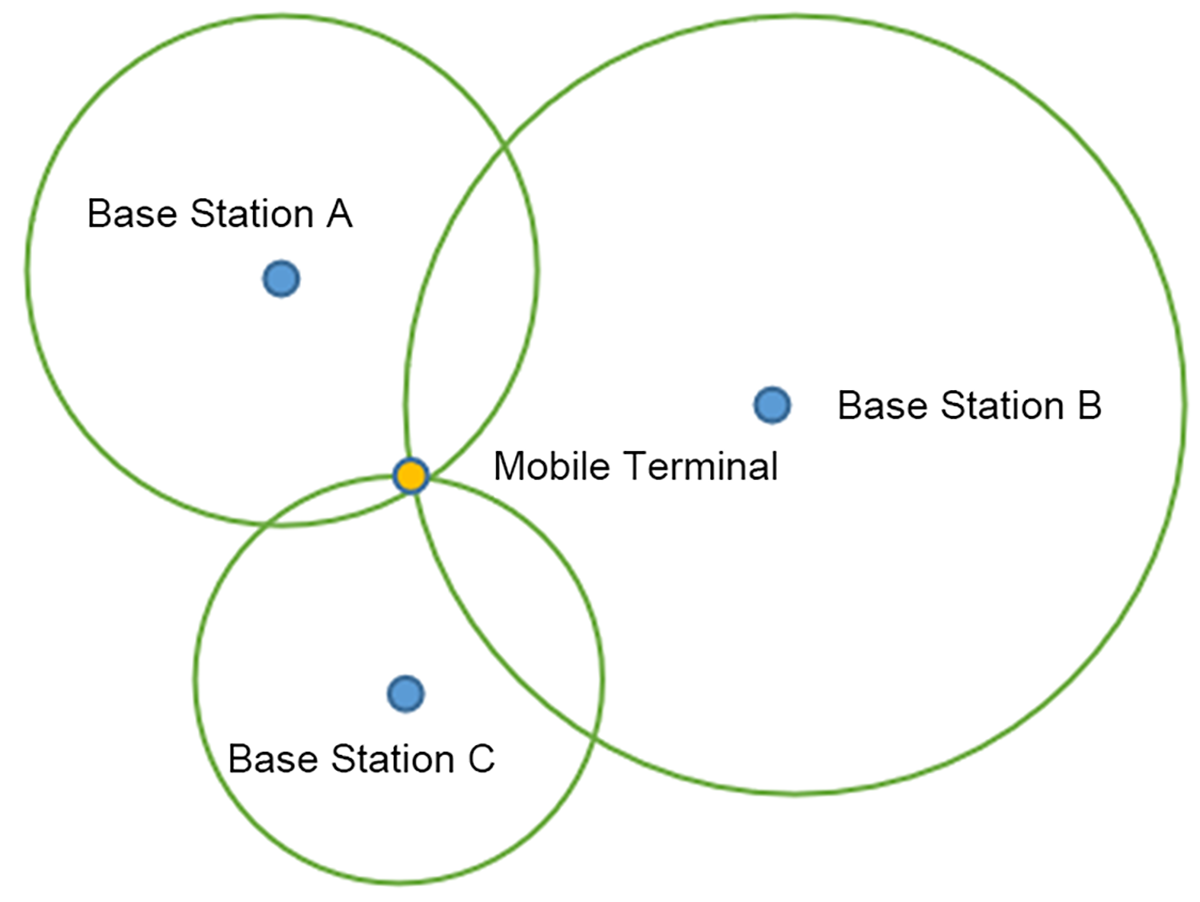
Abbildung 6. TOA-Positionierungsalgorithmus (Kreispositionierungsmethode)
Als Verbesserung gegenüber TOA führt TDOA eine präzise Synchronisation zwischen Basisstationen durch, was einfach zu realisieren ist. Es ist keine Zeitsynchronisation zwischen dem mobilen Endgerät und den Basisstationen betroffen, wie in 7 gezeigt. Berechnen Sie zuerst die Entfernungsdifferenz zwischen dem mobilen Endgerät und der Basisstation A und eine zwischen ihr und der Basisstation B. Das mobile Endgerät muss sich auf einer Hyperbel befinden mit Basisstation A und Basisstation B als Fokusse. Ein anderer Satz von Hyperbeln kann durch die Abstandsdifferenzen zwischen dem mobilen Endgerät und der Basisstation A und der Basisstation C erhalten werden, und der Schnittpunkt der Hyperbeln ist die Position des mobilen Endgeräts. Im Bereich des Fahrzeugraums kann auch der Einfluss von Mehrwegeausbreitung, Rauschen etc. durch Abstandsdifferenz reduziert werden.
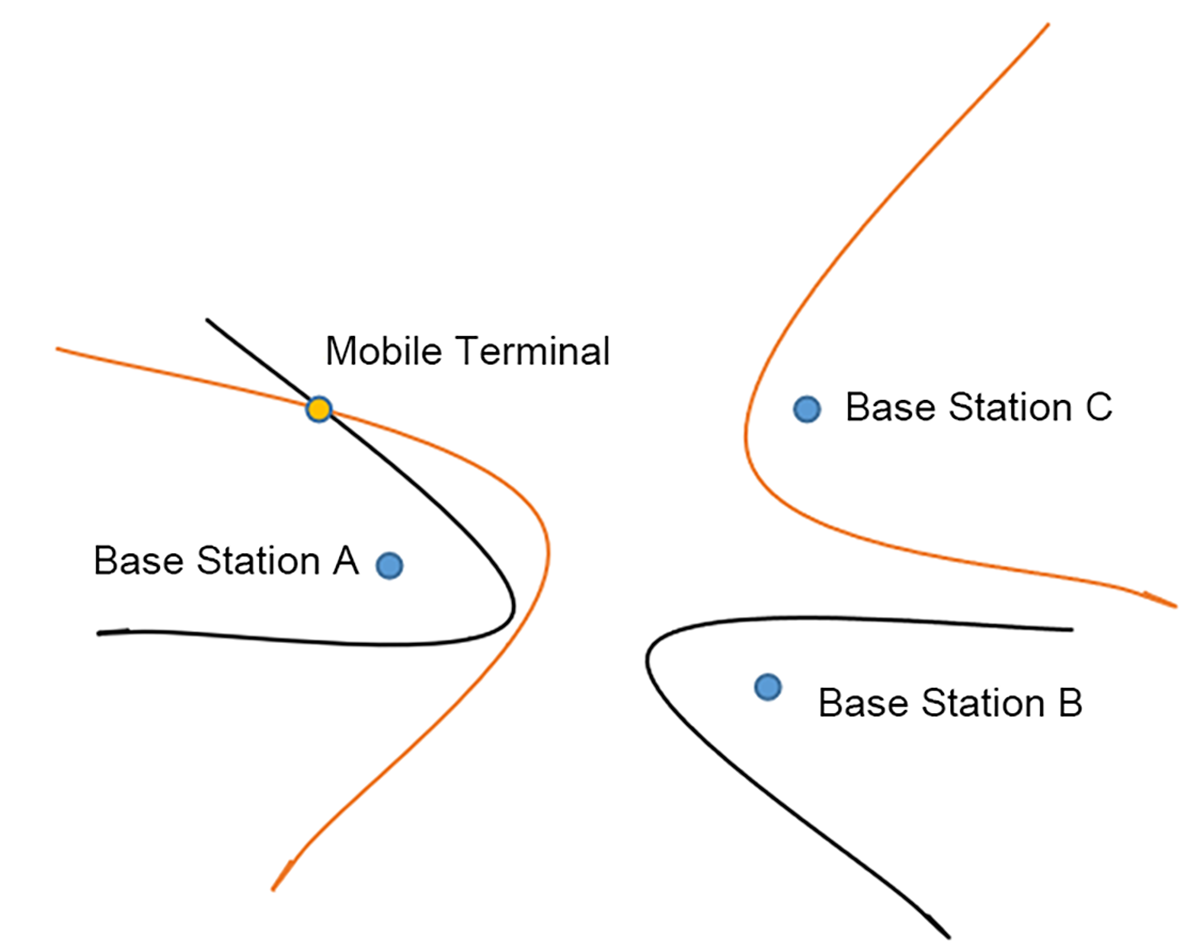
Abbildung 7 TDOA-Positionierungsalgorithmus
Die AOA-Ortung berechnet den Ankunftswinkel nach dem Prinzip der Phasendifferenz und benötigt nur zwei Basisstationen, um eine Ortung zu erreichen. Aufgrund der Frage der Winkelauflösung nimmt die Positionsgenauigkeit mit zunehmender Entfernung von der Basisstation ab und wird hauptsächlich zur Positionsbestimmung auf kurze und mittlere Entfernungen verwendet.
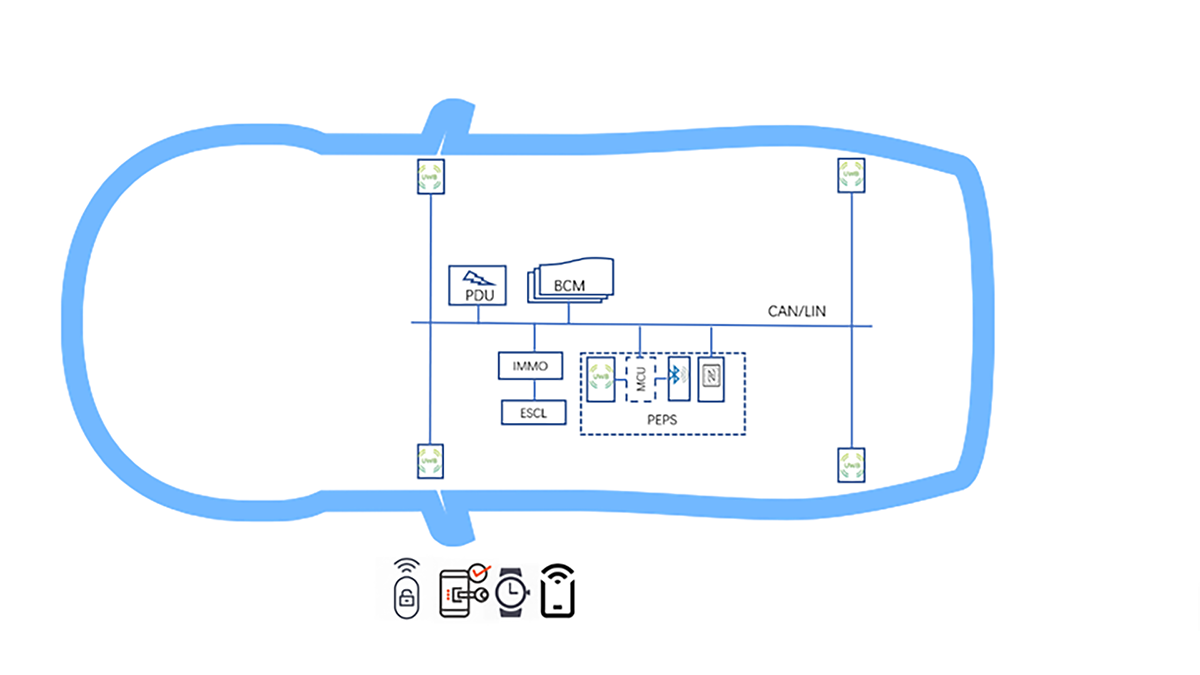
Abbildung 8. Implementierungsarchitektur von UWB PEPS, spezifiziert durch CCC 3.0
Im Bereich der UWB-Chips sind die derzeit anerkannten reifen Hersteller Apple, NXP Trimension und QORVO Decawave. Unter den freigegebenen ICs von NXP erfüllt nur der Trimension NCJ29D5 die Anforderungen der Fahrzeugvorschriften.
Erweiterung: Bio-Radar
Die Erfahrung von UWB PEPS für Fahrer ist sowohl intim als auch sicher. Doch geht es den Passagieren im Auto genauso? Normalerweise ja, aber in einigen Sonderfällen nein. Manchmal ist es hart für sie. Steigt der Fahrer zum Beispiel aus dem Auto, verriegeln sich die Türen automatisch. Ein Baby oder ein süßes Haustier wurde versehentlich im Auto gelassen. Soll das Auto Alarm an den Fahrer senden? Absolut notwendig! Glücklicherweise kann es von UWB gut angegangen werden.
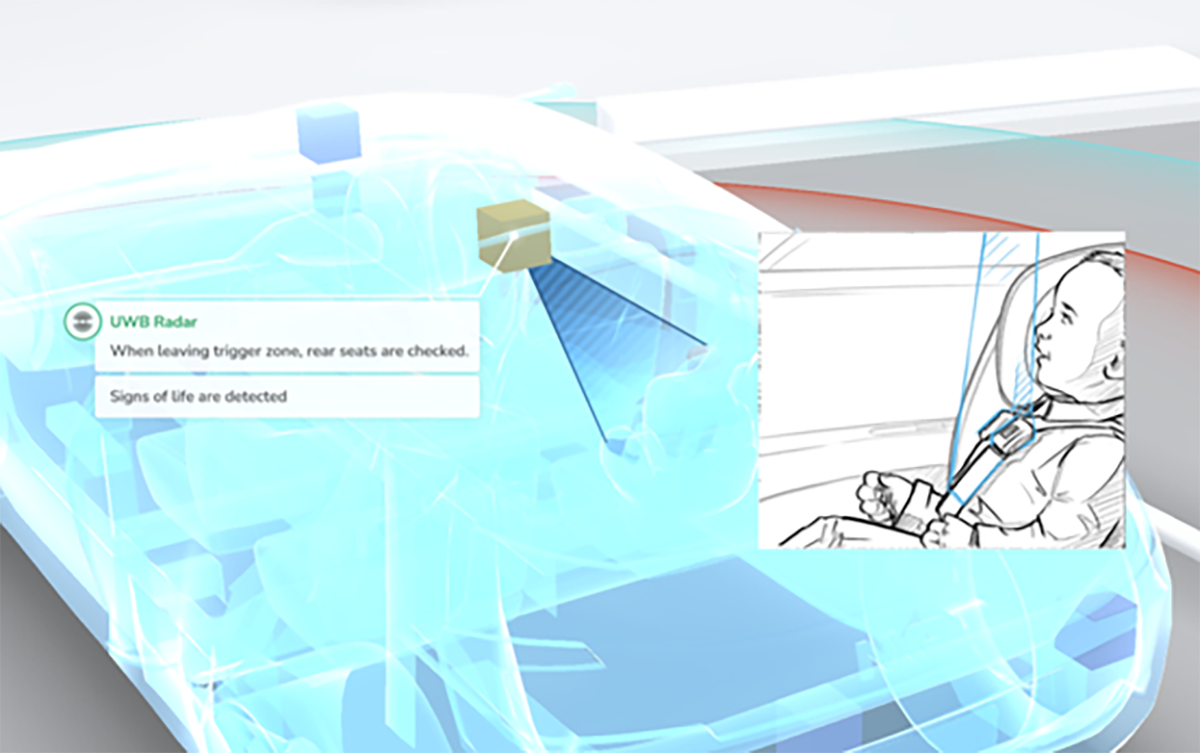
Abbildung 9. Lebenserkennung mit UWB-Bioradar
Kofferraum: Kick-to-Open
Zusätzlich zur Lebenserkennung im Fahrzeug, basierend auf der Bewegungswahrnehmung des UWB-Radars, verfügt UWB auch über eine clevere Anwendung des Stampfens zum Öffnen des Kofferraums. Wenn die Identität des Fahrers das Heck des Fahrzeugs erreicht, kann das UWB-Radar die Stampfaktion genau erkennen und dadurch automatisch den Kofferraum des Fahrzeugs öffnen.
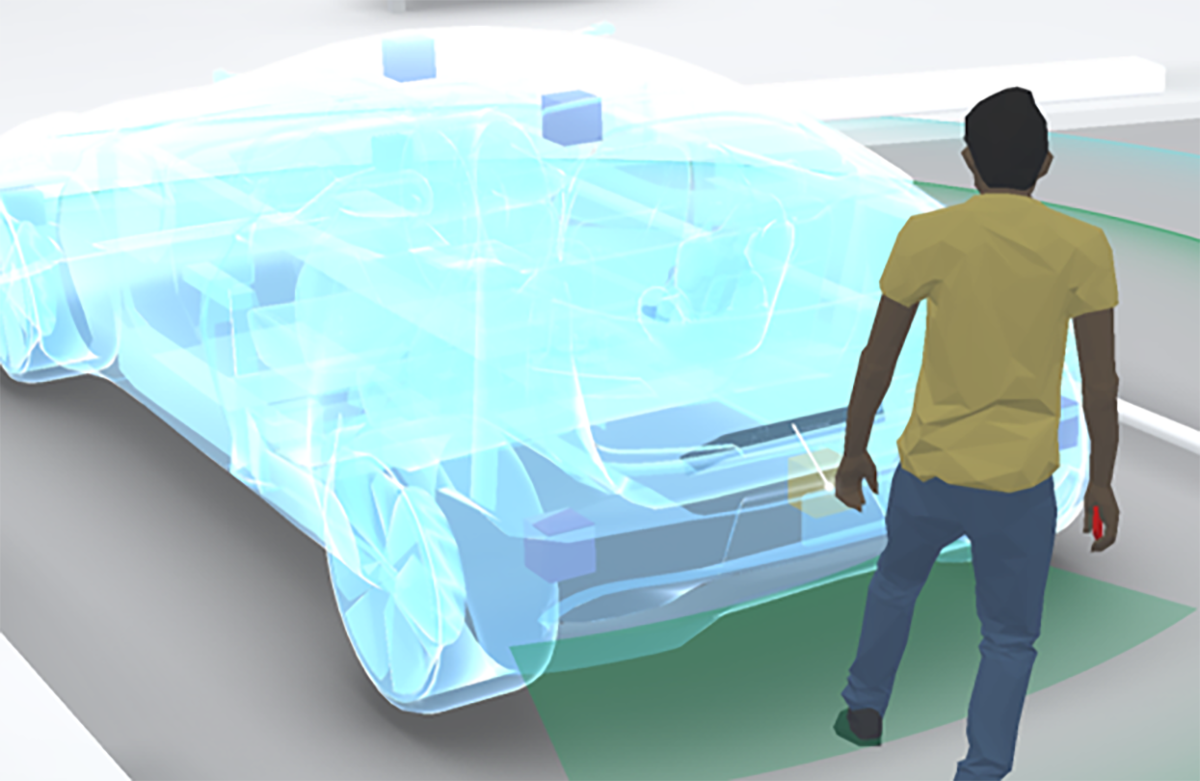
Abbildung 10. UWB ermöglicht Kick-to-Open-Lösung
Die beiden oben beschriebenen UWB-Radarfunktionen, einschließlich UWB-Bioradar und UWB-Kicking-Radar, erfordern keine zusätzliche Hardware, sondern werden nur durch Wiederverwendung von fahrzeugseitiger UWB-Hardware implementiert, ohne zusätzliche Hardwarekosten hinzuzufügen. Wir können sie auch als Teile zukünftiger UWB-PEPS-Funktionalität betrachten.
UWB-fähiges automatisches Valet-Parken
AVP (Automated Valet Parking) ist die autonome Valet-Parking-Funktion. Es ist als autonome Fahrtechnologie auf L4-Niveau bekannt, die den Benutzern die „Letzte-Meile-Freiheit“ bietet. Es ist derzeit das vielversprechendste Anwendungsszenario für autonomes Fahren für die Kommerzialisierung, wie in Abbildung 11 gezeigt. Ein weiterer großer Vorteil der Implementierung einer PEPS-Erfahrung mit UWB besteht darin, dass es die notwendigen und ausreichenden Bedingungen bietet, um AVP an der Seite des Autos zu implementieren.
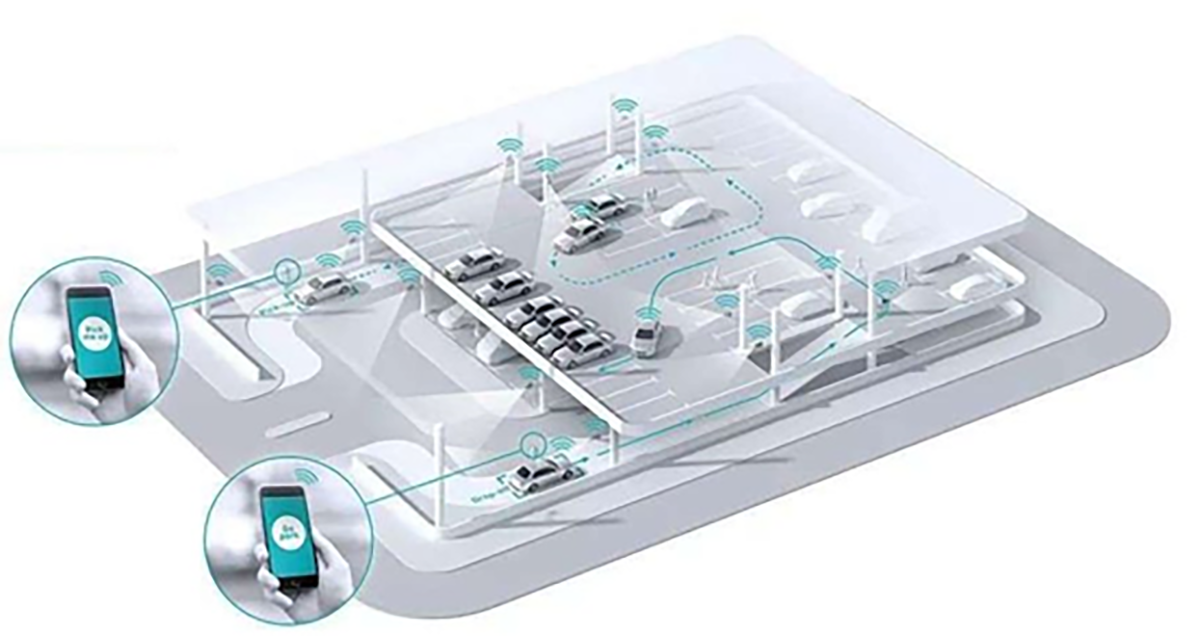
Abbildung 11 Automatisches Valet-Parksystem
Fig. 12 zeigt ein mögliches fahrzeugseitiges UWB-Knotenlayoutschema. Insgesamt vier UWB-PEPS-Knoten werden an den Scheinwerfern und Rücklichtern platziert, und ein fünfter UWB-PEPS+AVP-Knoten wird auf dem Dach platziert. Der fünfte Knoten kann sowohl das UWB-Signal im Auto als auch das UWB-Signal außerhalb des Autos empfangen und ist auch der Schlüsselknoten zum Realisieren der AVP-Funktion.
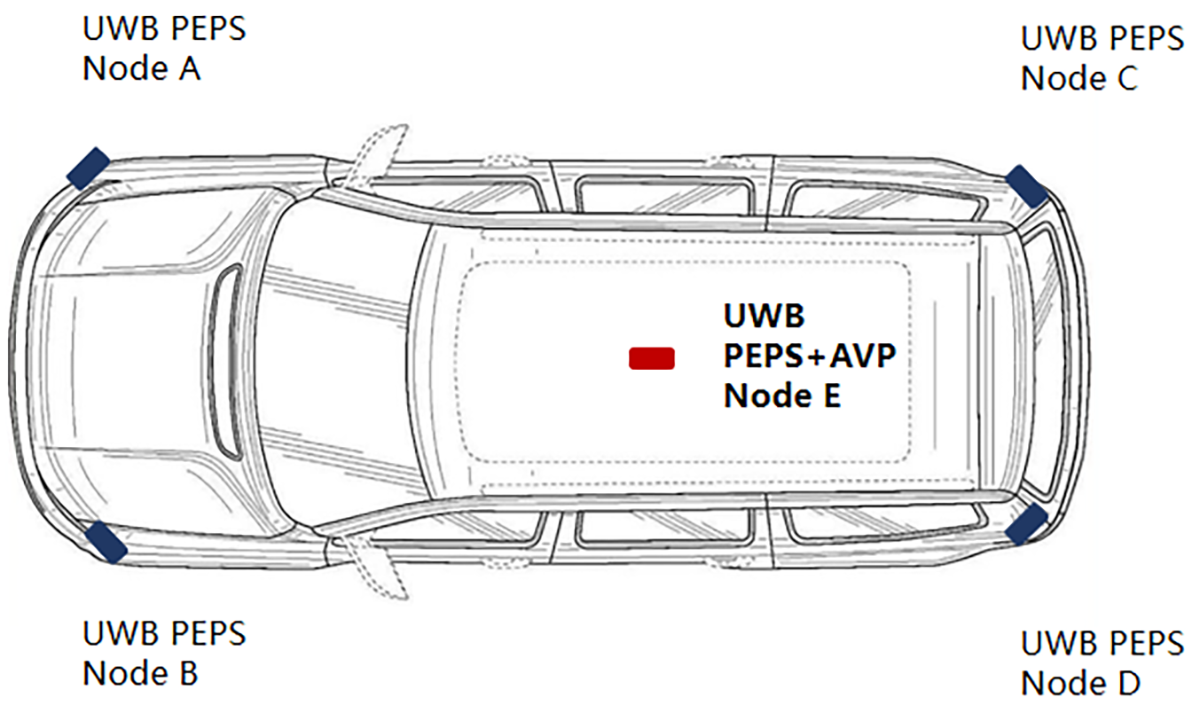
Abbildung 12 Architektur von PEPS + AVP
Im PEPS-Modus arbeitet der fünfte UWB-Knoten mit den anderen vier UWB-Knoten zusammen, um die Messung der Position des Smart Key abzuschließen, und sendet die Entfernungsinformationen an den Body Domain Controller (BCM), um die Berechnung der Position des Smart abzuschließen Schlüssel, um die Folgeoperationen zu entriegeln und zu starten.
Fazit
Shenzhen HQ: Room 503, Podium Building No. A-12, Shenzhen Bay Science and Technology Ecological Park, Nanshan District, Shenzhen, Guangdong, China, 518063
Chengdu Branch: N2-1604, Global Center, North No. 1700, Tianfu Avenue, Hi-Tech District, Chengdu, Sichuan, China
Tel : +86 (0)28-86925399
Email : info@szrfstar.com
Teams : Sunny Li
Whatsapp : +8618190842785














